
基于旋变反馈的受扰摆动阀脉冲器滑模跟踪控制
中文题目:基于旋变反馈的受扰摆动阀脉冲器滑模跟踪控制
论文题目:Resolver to digital conversion-based sliding mode tracking control for oscillating valve pulser with disturbances
录用期刊/会议:Journal of vibration and control (中科院大类3区)
录用时间:2025年3月29日
作者列表:
1) 王新鹏 中国天天色天天(北京)人工智能学院 新一代电子信息技术 硕21
2) 刘得军 中国天天色天天(北京)人工智能学院 电子系教授
3) 陈晓晖 中国石化石油工程技术研究院有限公司
4) 杨书博 中国石化石油工程技术研究院有限公司
5) 张良臣 中国石化石油工程技术研究院有限公司
摘要:
研究了泥浆连续波传输过程中使用的摆动阀脉冲器的控制问题。构造了一种固定时间收敛的动态方程,在双环架构下提出了一种旋变传感器的角度估计方法,利用该方法得到转子状态信息并将其反馈至控制器和观测器中使用;证明了约束收敛时间、角度估计精度及整体闭环系统的稳定性;通过几种不同的角度估计方法的比较说明了所提方法的性能,最后通过两组高频调制轨迹的集成跟踪测试,证实了其能够产生清晰的泥浆压力信号。
背景与动机:
为实时了解井下工况、仪器状态和地层信息,需要获取大量的数据,连续波传输技术是实现高速数据传输的重要手段之一。对于旋转阀脉冲器和摆动阀脉冲器,前者需要对转子的转速进行控制,而后者需要对转子位置进行控制,相关研究多集中在旋转阀脉冲器的转速控制上,关于摆动阀脉冲器的位置控制研究鲜有报道。转子在进行高频振荡时会引起周期性的和非衰减性扰动,由此将导致控制精度的损失,此外,由于使用成本和高温环境压力,使用基于硬件的RDC方法给OVP系统带来了挑战,而基于软件的RDC方法,不同的解调和角度估计方法将导致不同的解算精度,而解算精度将直接影响控制系统的性能。
主要内容:
基于固定时间收敛方程设计了一种旋变传感器的角度估计方法,通过RDC所获取的角度和转速被用于控制器和观测器中使用,控制器和观测器基于super-twisting滑模和有限时间扰动观测器进行设计,有效抑制了参数不确定和高频水力转矩干扰所带来的影响,最后以RDC提供的角度和转速在高频扰动情况下进行了两条调制轨迹的跟踪测试,结果表明误差能够在有限时间收敛至平衡点附近的微小邻域内。
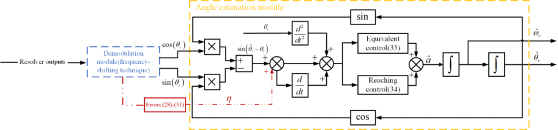
图1 旋变解码流程
图1表示旋变的输出首先经过解调模块得到带有解调误差的包络信号,随后送入角度估计模块,通过角度估计得到实际的转子角度和转速。
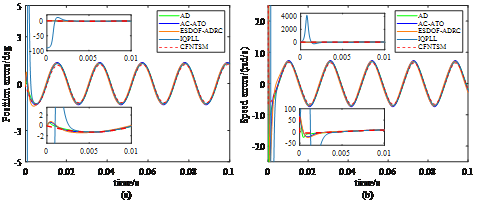
图2 角度估计方法的比较
脉冲发生器的转子需要频繁地启停,因此在实际应用中要求超调量尽可能小且响应快。图2表明CFNTSM具有更高的跟踪精度和响应速度,误差在有限时间内收敛到平衡点的小邻域内,且该方法能够保证RDC系统的稳定性。控制器综合设计为:
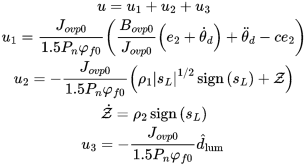
该控制结构可以使OVP系统在干扰下的跟踪误差快速收敛到平衡点的小邻域内,并保证电流内环参考信号抖振的有效减弱。
(a)
(b)
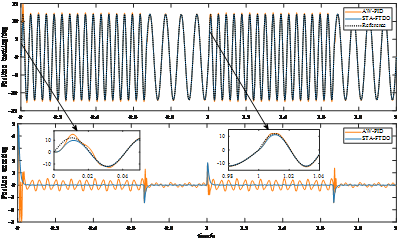
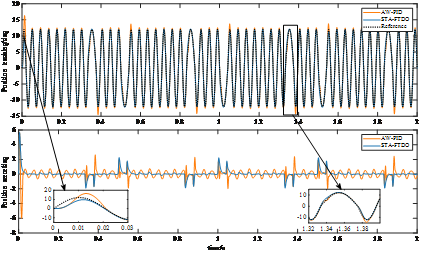
图3轨迹跟踪结果 (a) FSK轨迹 (b) PSK轨迹
图3表明在初始阶段和频率或相位变化时刻,STA-FTDO能够迅速符合期望轨迹,超调量小且保持最小的瞬态误差。即使存在高频干扰,STA-FTDO能够在两种不同的轨迹上保持最小的跟踪误差。在RDC反馈下,转子能够以较小的误差执行启停、频率切换、相位切换等调制命令,保证了转子在参数不确定和水力转矩扰动的情况下准确地跟踪两条理想的振荡轨迹,即产生清晰的压力信号。
结论:
研究解决了与摆动阀脉冲发生器相关的控制挑战。为此,介绍了一种新的 RDC 角度估计方法,实现了控制系统的双回路配置。在 RDC 反馈下,采用两种不同的调制策略进行了轨迹跟踪测试。结果表明,该控制方案能够保持较高的跟踪精度,在干扰条件下仍能产生连续的泥浆压力波动。在未来,摆动阀脉冲器将注重故障重构技术和驱动电压的优化分配,以适应更加具有挑战性的深地和深海环境。
作者简介:
刘得军,教授,中国天天色天天(北京),人工智能学院电子信息工程系,博士生导师。研究方向:电磁测量方法与数值模拟技术、电缆高速数据传输理论与技术、机电测量系统虚拟样机设计等。总计发表科学论文150余篇。
联系方式:Email: liudj65@163.com