
基于自适应集员辨识和全驱模型的非线性系统自适应控制
中文题目:基于自适应集员辨识和全驱模型的非线性系统自适应控制
论文题目:Adaptive Control of Nonlinear Systems Based on Adaptive Set-membership Identification and Fully Actuated Modeling
录用期刊/会议:China Control and Decision Conference(CCDC)(CAA A类会议)
作者列表:
1)叶 胜 中国天天色天天(北京)人工智能学院 控制工程专业 硕22级
2)王 珠 中国天天色天天(北京)人工智能学院 自动化系教师
3)郑佳旺 中国天天色天天(北京)人工智能学院 控制科学与工程专业 硕23级
摘要:
本文针对具有近似单调非线性的动态过程,设计了一种可靠有效的自适应控制算法。一种简化的Wiener模型被用来表示具有近似单调非线性的动态过程,这种Wiener模型是一种特殊类型的全驱动模型。此外,引入了一种基于未知但有界(UBB)噪声的改进椭球集员辨识算法,以考虑与系统噪声相关的不确定性。该算法自适应地估计噪声界,克服了传统集员辨识算法因高估噪声界而导致的性能下降和辨识误差。同时,基于改进的集员辨识,提出了一种新颖的非线性滤波器设计方法,旨在产生更精确的滤波输出,以增强控制系统的适应性和跟踪能力。基于非线性滤波的改进集员辨识算法的自适应控制实现了输出的渐近跟踪和全局稳定。
背景与动机:
大多数工业过程都表现出非线性特性,为了获得更好的性能,已经提出了许多非线性建模结构。事实上,几乎任何非线性系统都可以用具有任意高精度的维纳模型来近似,而在假设系统噪声的统计特性已知的情况下,维纳模型的识别已经被广泛研究。在工业非线性动态过程中,控制的目标是设计一个合适的控制器,使被控变量能够精确地跟踪预定的参考信号。在这种情况下,本文提出了基于自适应集员辨识和全驱模型的非线性系统自适应控制。
设计与实现:
非线性系统自适应控制包括改进的集员辨识算法,新的非线性滤波器和基于全驱模型的自适应控制。通过集员辨识可以获得具有不确定性的系统模型。当参数解集合接近真实参数时,噪声界限也收敛到其真实值。具有非线性滤波的改进集员辨识的自适应控制算法提供了更精确的滤波输出和对参考轨迹的更好跟踪。
1.优化椭球广义半径集员算法
在集员辨识算法中,有一种独特的数据选择能力,参数在当前时刻是否更新取决于当前时刻的输入输出数据是否包含能进一步约简可行集的信息。如果当前时刻的输入输出数据包含可以进一步约简可行集的信息,则需要更新参数;相反,如果当前时刻的数据不包含可以进一步缩减可行集的信息,则不需要更新参数,并且算法不在这一点递归推进。该信息是最小化可行集的最优性标准。不同参数辨识算法的区别在于基于不同最优性准则求解的最优加权因子不同。不同因素的选择影响最终可行解集的大小。最优权重因子的确定是通过参数的选取准则来完成的,其目的是用于更新椭球的广义半径可以通过对广义半径关于权重因子求导得到
2.新型卡尔曼滤波器
在卡尔曼滤波方法中,方程大致分为两类:时间更新方程和测量更新方程。时间更新方程对于推进当前状态和误差协方差的估计至关重要。这些方程有助于推导未来时间步骤的先验估计。另一方面,测量更新方程用于将新的测量纳入现有的先验估计中,从而将这些估计细化为更精确的后验估计。此外,在我们的研究框架内,这些方程(时间和测量更新)都适用于非线性滤波器。这种适应性使非线性滤波器能够在嘈杂的条件下有效地充当状态观察器。根据自适应因子的设计,本文中自适应因子选择为

3.自适应控制
Wiener模型在一些特殊情况下具有全驱性,故全驱控制理论的方法可以用来处理Wiener模型,此时,响应分析和稳定性分析的问题不像状态空间方法那样必要,因为通过全驱方法设计的闭环系统是常数和线性的,或者具有常数和线性的主要部分(当增加不确定性时)。如果一个一般的离散时间系统可以等价地转化为一个全驱模型,那么它就可以被定义为可控的。本文用未知参数的递归估计代替未知参数给出了下面的自适应控制

实验结果及分析:
为了测试所提出的自适应控制,考虑一个输入非线性过程,即Hammerstein过程。该过程被设计成包含输入的单调二次非线性和线性动态部分。参考信号如图一所示
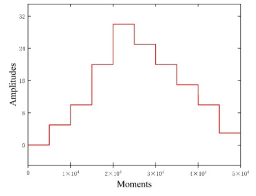
图1 参考信号
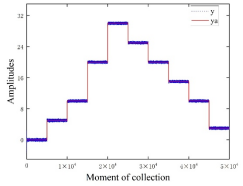
图2 零初始化下噪声输出的跟踪性能
对于选用的输入非线性过程,图2描述了整体跟踪性能,可以看出跟踪误差很小并且是有界的。这也说明了所提出的自适应控制的普遍性。
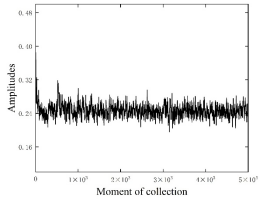
图3 估计噪声界限
为了防止数据的冗余过长,如图3所示,提取一部分噪声边界,从图中可以看出,通过引入残差序列和自适应估计噪声界,当参数解集合接近真实参数时,噪声界限也收敛到其真实值,确保了自适应噪声界限算法的收敛。
结论:
提出了一种基于改进集员辨识的自适应控制方法,该方法通过一个非线性滤波器来减小噪声对系统的影响。通过将维纳模型与全驱系统方法相结合,来自全驱系统方法的自适应控制被证明对于维纳模型是有效的,从而引入了控制这种模型的新方法。与传统的辨识方法相比,基于自适应噪声界的改进集员辨识算法利用了残差序列和噪声界的自适应估计。这种方法不仅使系统能够更快地响应,而且增强了其鲁棒性。在此基础上,受输出噪声干扰下的卡尔曼滤波方程的启发,将时间更新方程和测量更新方程推广到非线性滤波器中,得到了基于改进集员辨识的非线性滤波器。基于具有非线性滤波的改进集员辨识的自适应控制算法提供了更精确的滤波输出和对参考轨迹的更好跟踪,并表现出更好的鲁棒性。该方法可以在工程中得到实际应用,实现非线性系统的有效自适应控制。
作者简介:
王珠,男,博士,中共党员,现任中国天天色天天(北京)副教授、硕士生导师。2016年至今在中国天天色天天(北京)自动化系工作,现任中国自动化学会人工智能技术与工业应用专业委员会委员、中国化工学会信息技术应用专业委员会青年委员、北京人工智能学会理事。
在科研与社会服务方面,研究兴趣为系统辨识与智能控制、炼化过程动态异常诊断与故障预警、大数据质量预测与综合优化。近年来,主持重点流程工业企业的智能报警项目数项以及国家自然科学基金,已发表高水平学术论文30余篇。